შესრულების ოპტიმიზაცია MPU-6050– ით: დაყენება, კალიბრაცია და პროგრამები
2024-04-25
9264
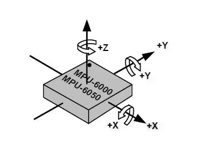
MPU-6050 არის მსოფლიოში პირველი ინტეგრირებული 6-ღერძიანი მოძრაობის დამუშავების კომპონენტი, რომელიც აერთიანებს 3-ღერძი გიროსკოპს, 3-ღერძიანი ამაჩქარომეტრს და მასშტაბურ ციფრული მოძრაობის პროცესორს (DMP).მისი გამოყენების მიზანია გაზომვის ობიექტის მიდრეკილების კუთხის მოპოვება (მაგალითად, quadcopter, დამაბალანსებელი მანქანა) X, Y და Z ღერძებზე, ანუ, მოედანზე კუთხე, გააფართოვოს კუთხე და ყბის კუთხე.ჩვენ ვკითხულობთ MPU-6050- ის ექვსი მონაცემს (სამი ღერძი აჩქარების AD მნიშვნელობა და სამ ღერძიანი კუთხის სიჩქარე AD მნიშვნელობა) I2C ინტერფეისის საშუალებით.Posture Fusion დამუშავების შემდეგ შეიძლება გამოითვალოს მოედანი, რულეტი და ყბის კუთხეები.როგორც მიმართულების მითითება გაზომვის მნიშვნელობებისთვის, სენსორის კოორდინატის მიმართულების განმარტება, როგორც ეს მოცემულია ქვემოთ მოცემულ ფიგურაში, რომელიც მიჰყვება მარჯვენა ხელით კოორდინატთა სისტემის პრინციპს (ანუ მარჯვენა თითი მიუთითებს x-ღერძი, საჩვენებელი თითი მიუთითებს Y- ღერძის პოზიტიურ მიმართულებაზე, ხოლო შუა თითი მიუთითებს Z- ღერძის პოზიტიურ მიმართულებაზე).
კატალოგი
MPU-6050– ს თავისი გამოყოფილი I2C სენსორის ავტობუსით შეუძლია მიიღოს შეყვანა პირდაპირ 3-ღერძიანი კომპასისგან, რაც უზრუნველყოფს 9-ღერძიანი მოძრაობის MotionFusion ™ გამომუშავებას.ეს გამორიცხავს შეუსაბამობის პრობლემას კომბინირებულ გიროსკოპსა და ამაჩქარებლის ვადებს შორის და მნიშვნელოვნად ამცირებს შეფუთვის ადგილს მრავალ კომპონენტურ გადაწყვეტილებებთან შედარებით.სამქსის მაგნიტომეტრთან დაკავშირებისას, MPU-60x0- ს შეუძლია უზრუნველყოს 9 ღერძიანი მოძრაობის შერწყმის სრული I2C ან SPI პორტით (გაითვალისწინეთ, რომ SPI პორტი ხელმისაწვდომია მხოლოდ MPU-6000).
ალტერნატივები და ეკვივალენტები
- MPU-3300
- MPU-6000
- MPU-6500
MPU-6050 მწარმოებელი
MPU-6050- ის მწარმოებელი არის TDK.TDK– ის ორი დამფუძნებლების შემდეგ, დოქტორ იოგორო კატოს და ტეიკ ტეიკმა, გამოიგონეს ფერიტი ტოკიოში, მათ დააარსეს ტოკიო დენკიკაგაკუ კოგიო კ.კ.1935 წელს. როგორც გლობალური ელექტრონიკის ინდუსტრიის ბრენდი, TDK ყოველთვის ინარჩუნებდა დომინანტურ პოზიციას ელექტრონული ნედლეულის და ელექტრონული კომპონენტების სფეროებში.TDK– ის ყოვლისმომცველი და ინოვაციით ორიენტირებული პროდუქტის პორტფოლიო მოიცავს პასიურ კომპონენტებს, როგორიცაა კერამიკული კონდენსატორები, ალუმინის ელექტროლიტური კონდენსატორები, ფილმის კონდენსატორები, მაგნიტური პროდუქტები, მაღალი სიხშირის კომპონენტები, პიეზოელექტრული და დამცავი მოწყობილობები, ასევე სენსორები და სენსორული სისტემები (როგორიცაა ტემპერატურა და წნევა, მაგალითად, ტემპერატურა და წნევა, როგორიცაა ტემპერატურა და წნევა, როგორიცაა ტემპერატურა და წნევა, როგორიცაა ტემპერატურა და წნევა, როგორიცაა ტემპერატურა და ზეწოლა, როგორიცაა ტემპერატურა და წნევა,, როგორიცაა ტემპერატურა და წნევა,მაგნიტური და MEMS სენსორები) და ა.შ. გარდა ამისა, TDK ასევე უზრუნველყოფს ელექტრომომარაგებას და ენერგეტიკულ მოწყობილობებს, მაგნიტურ თავებს და სხვა პროდუქტებს.მისი პროდუქტის ბრენდებში შედის TDK, EPCOS, Invensense, Micronas, Tronics და TDK-Lambda.
შიდა ბლოკის დიაგრამა MPU-6050

მათ შორის, SCL და SDA არის IIC ინტერფეისები, რომლებიც დაკავშირებულია MCU- სთან, ხოლო MCU აკონტროლებს MPU-6050- ს ამ IIC ინტერფეისით.ასევე არსებობს IIC ინტერფეისი, კერძოდ Aux_Cl და aux_da.ეს ინტერფეისი შეიძლება გამოყენებულ იქნას გარე მონების მოწყობილობების, მაგალითად, მაგნიტური სენსორების დასაკავშირებლად, ცხრა ღერძიანი სენსორის შესაქმნელად.Vlogic არის IO პორტის ძაბვა.ამ პინს შეუძლია მინიმუმ 1.8 ვ.ჩვენ ჩვეულებრივ მას პირდაპირ ვუკავშირდებით VDD- ს.AD0 არის მონა IIC ინტერფეისის მისამართის კონტროლის პინი (უკავშირდება MCU).ეს პინი აკონტროლებს IIC მისამართის ყველაზე დაბალ ნაწილს.თუ იგი უკავშირდება GND- ს, MPU-6050- ის IIC მისამართი არის 0x68;თუ იგი უკავშირდება VDD- ს, ეს არის 0x69.გთხოვთ გაითვალისწინოთ, რომ აქ მისამართი არ შეიცავს მონაცემთა გადაცემის ყველაზე დაბალ ნაწილს (ყველაზე დაბალი ბიტი გამოიყენება წაკითხვისა და ჩაწერის ოპერაციების დასადგენად).MWBalancedSTC15- ზე, AD0 უკავშირდება GND- ს, ასე რომ MPU-6050- ის IIC მისამართი არის 0x68 (ყველაზე დაბალი ბიტის გამოკლებით).
ინიციალიზაცია IIC ინტერფეისი
MPU-6050 იყენებს IIC– ს კომუნიკაციისთვის STC15– სთან, ასე რომ, პირველ რიგში, ჩვენ უნდა გავამახვილოთ SDA და SCL მონაცემთა ხაზები, რომლებიც დაკავშირებულია MPU-6050– სთან.
გადატვირთეთ MPU-6050
ეს ნაბიჯი აღადგენს ყველა რეგისტრაციას MPU-6050- ის შიგნით მათი ნაგულისხმევი მნიშვნელობებით, რაც მიიღწევა ენერგიის მართვის რეესტრის 1 (0x6b) 1 (0x6b) ჩაწერით.გადატვირთვის შემდეგ, ელექტროენერგიის მენეჯმენტის რეესტრი 1 აღდგება ნაგულისხმევი მნიშვნელობით (0x40), და ეს რეგისტრაცია შემდგომში უნდა იყოს მითითებული 0x00– ზე, რომ გაიღვიძოს MPU-6050 და ჩაითვალოს იგი ნორმალურ სამუშაო მდგომარეობაში.
დააყენეთ კუთხის სიჩქარის სენსორის (Gyro) და აჩქარების სენსორის სრულმასშტაბიანი დიაპაზონი
ამ ეტაპზე, ჩვენ დავაყენეთ ორი სენსორის სრულმასშტაბიანი დიაპაზონი (FSR) გიროსკოპის კონფიგურაციის რეესტრის (0x1b) და აჩქარების სენსორის კონფიგურაციის რეესტრის (0x1c) მეშვეობით.როგორც წესი, ჩვენ ვაყენებთ გიროსკოპის სრულმასშტაბიანი დიაპაზონს ± 2000dps და ამაჩქარებლის სრულმასშტაბიანი დიაპაზონი ± 2G- მდე.
დააყენეთ სხვა პარამეტრები
აქ, ჩვენ ასევე უნდა დავაყენოთ შემდეგი პარამეტრების კონფიგურაცია: გამორთეთ შეფერხებები, გამორთეთ Aux i2c ინტერფეისი, გამორთეთ FIFO, დააყენეთ გიროსკოპის შერჩევის სიჩქარე და დააკონფიგურიროთ ციფრული დაბალი გამავლობის ფილტრი (DLPF).ვინაიდან ამ თავში მონაცემების წაკითხვის შეფერხებებს არ ვიყენებთ, შეფერხების ფუნქციის გამორთვაა საჭირო.ამავე დროს, რადგან ჩვენ არ ვიყენებთ AUX I2C ინტერფეისს სხვა გარე სენსორების დასაკავშირებლად, ჩვენ ასევე უნდა დახუროთ ეს ინტერფეისი.ამ ფუნქციების კონტროლი შესაძლებელია შეფერხების ჩართვის რეგისტრაციის (0x38) და მომხმარებლის კონტროლის რეესტრის საშუალებით (0x6a).MPU-6050- ს შეუძლია გამოიყენოს FIFO სენსორის მონაცემების შესანახად, მაგრამ ჩვენ არ გამოვიყენეთ იგი ამ თავში, ასე რომ FIFO- ს ყველა არხი უნდა დაიხუროს.ამის კონტროლი შესაძლებელია FIFO- ს ჩართვის რეესტრის საშუალებით (0x23).სტანდარტულად, ამ რეესტრის მნიშვნელობა არის 0 (ანუ FIFO გამორთულია), ასე რომ, ჩვენ შეგვიძლია პირდაპირ გამოვიყენოთ ნაგულისხმევი მნიშვნელობა.გიროსკოპის შერჩევის მაჩვენებელი კონტროლდება შერჩევის განაკვეთის გამყოფი რეესტრით (0x19).ჩვეულებრივ, ჩვენ დავაყენეთ ამ შერჩევის მაჩვენებელი 50. ციფრული დაბალი გამავლობის ფილტრის (DLPF) კონფიგურაცია დასრულებულია კონფიგურაციის რეესტრის საშუალებით (0x1a).საერთოდ, ჩვენ დავაყენებთ DLPF- ს სიჩქარეს ნახევარზე, რათა დავაბალანსოთ მონაცემთა სიზუსტე და რეაგირების სიჩქარე.
კონფიგურაცია სისტემის საათის წყაროს და ჩართეთ კუთხის სიჩქარის სენსორი და აჩქარების სენსორი
სისტემის საათის წყაროს პარამეტრი დამოკიდებულია ენერგიის მართვის რეესტრზე 1 (0x6b), სადაც ამ რეესტრის ყველაზე დაბალი სამი ბიტი განსაზღვრავს საათის წყაროს შერჩევას.სტანდარტულად, ეს სამი ბიტი მითითებულია 0 -ზე, რაც ნიშნავს, რომ სისტემა იყენებს შიდა 8MHz RC ოსცილატორს, როგორც საათის წყაროს.ამასთან, საათის სიზუსტის გასაუმჯობესებლად, ჩვენ ხშირად ვაყენებთ მას 1-ზე და შევარჩიეთ x- ღერძის გიროსკოპის PLL, როგორც საათის წყარო.გარდა ამისა, კუთხის სიჩქარის სენსორისა და აჩქარების სენსორის ჩართვა ასევე მნიშვნელოვანი ნაბიჯია ინიციალიზაციის პროცესში.ორივე ოპერაცია ხორციელდება ენერგიის მართვის რეესტრის მეშვეობით 2 (0x6c).უბრალოდ დააყენეთ შესაბამისი ბიტი 0 -ზე, რომ გააქტიუროთ შესაბამისი სენსორი.ზემოაღნიშნული ნაბიჯების დასრულების შემდეგ, MPU-6050- ს შეუძლია შეიტანოს ნორმალური სამუშაო სტატუსი.ის რეგისტრატორები, რომლებიც სპეციალურად არ არის მითითებული, მიიღებენ სისტემის მიერ წინასწარ განსაზღვრულ სტანდარტულ მნიშვნელობებს.
როგორ მუშაობს MPU-6050?
გირო სენსორი
სენსორი აღჭურვილია გიროს შიგნით, რომელიც ყოველთვის დარჩება საწყისი მიმართულებით პარალელურად, გიროსკოპიული ეფექტის გამო.აქედან გამომდინარე, ჩვენ შეგვიძლია გამოვთვალოთ როტაციის მიმართულება და კუთხე, გიროს გადახრა საწყისი მიმართულებით.
აქსელერომეტრის სენსორი
აქსელერომეტრის სენსორი არის მოწყობილობა, რომელსაც შეუძლია გაზომოს აჩქარება და ის მუშაობს პიეზოელექტრული ეფექტის პრინციპის საფუძველზე.აჩქარების დროს, სენსორი ზომავს მასობრივ ბლოკზე გამოყენებული ინერციული ძალას და შემდეგ ითვლის აჩქარების მნიშვნელობას ნიუტონის მეორე კანონის გამოყენებით.
ციფრული მოძრაობის პროცესორი (DMP)
DMP არის მონაცემთა დამუშავების მოდული MPU6050 ჩიპში, რომელსაც აქვს ჩაშენებული კალმანის ფილტრაციის ალგორითმი, გიროსკოპისა და ამაჩქარებლის სენსორებიდან მონაცემების შეძენისთვის და გამომავალი მეოთხედების დასამუშავებლად.ეს ფუნქცია მნიშვნელოვნად ამცირებს პერიფერიული მიკროპროცესორის დატვირთვას და თავიდან აიცილებს რუტინული ფილტრაციის და მონაცემთა შერწყმის პროცესს.
შენიშვნები:
მეოთხედი: მეოთხედი მარტივი სუპერკომპლექსური ნომრებია.რთული რიცხვები შედგება რეალური რიცხვებისგან, დამატებით წარმოსახვითი ერთეული I, სადაც i^2 = -1.
სად გამოიყენება MPU-6050?
- სათამაშოები
- ტელეფონი და პორტატული თამაშები
- მოძრაობის დაფუძნებული თამაშის კონტროლერები
- Blurfree ™ ტექნოლოგია (ვიდეო/ჯერ კიდევ სურათის სტაბილიზაციისთვის)
- AirSign ™ ტექნოლოგია (უსაფრთხოების/ავტორიზაციისთვის)
- Instantgesture ™ IG ™ ჟესტების აღიარება
- აცვიათ სენსორები ჯანმრთელობისთვის, ფიტნესა და სპორტისთვის
- მოძრაობის ჩართული თამაშისა და განაცხადის ჩარჩო
- MotionCommand ™ ტექნოლოგია (ჟესტისთვის მოკლევადიანი)
- ადგილმდებარეობაზე დაფუძნებული მომსახურება, ინტერესის წერტილები და მკვდარი რეკონსტრუქცია
- 3D დისტანციური კონტროლი ინტერნეტთან დაკავშირებულ DTV– სთვის და დააყენეთ ზედა ყუთები, 3D თაგვები
- Touchanywhere ™ ტექნოლოგია (UI პროგრამის კონტროლი/ნავიგაცია)
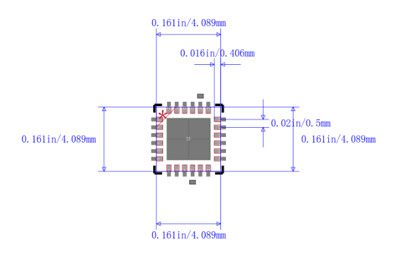
MPU-6050 პაკეტი
როგორ შევამციროთ MPU-6050 ხმაური?
ჩვენ შეგვიძლია მივიღოთ შემდეგი გზები MPU-6050- ის ხმაურის შესამცირებლად.
გამოიყენეთ კალიბრირებული სენსორები
MPU-6050- ის ამაჩქარებლისა და გიროსკოპის დაკალიბრებამ შეიძლება აღმოფხვრას სენსორების მიკერძოება და შეცდომა, რითაც ამცირებს ხმაურის ეფექტს.კალიბრაციის პროცესი ჩვეულებრივ შედგება ორი ეტაპისგან: სტატიკური კალიბრაცია და მოძრაობის კალიბრაცია.
ტექნიკის ფილტრაციის პროცესი
ფილტრის კონდენსატორების დამატებამ MPU-6050- ის ელექტროგადამცემი ხაზით შეიძლება შეამციროს ელექტრომომარაგების ხმაურის გავლენა სენსორზე.იმავდროულად, PCB განლაგების დროს, ჩვენ უნდა შევეცადოთ MPU-6050 თავი დავანებოთ ჩარევის პოტენციურ წყაროებს, როგორიცაა მაღალი სიხშირის სიგნალის ხაზები და მაღალი სიმძლავრის კომპონენტები.
პროგრამული უზრუნველყოფის ფილტრაციის დამუშავება
MPU-6050– დან ნედლეული მონაცემების შეგროვების შემდეგ, ჩვენ შეგვიძლია დავამატოთ პროგრამული უზრუნველყოფის ფილტრაციის ბმული, რომ წინასწარ დამუშავდეს საწყისი მონაცემები ხმაურის გამოწვეული ჩარევის აღმოსაფხვრელად.ჩვეულებრივ გამოყენებული პროგრამული უზრუნველყოფის ფილტრაციის მეთოდები მოიცავს საშუალო ფილტრაციას, საშუალო ფილტრაციას, კალმანის ფილტრაციას და ა.შ.
გამოიყენეთ შიდა დაბალი გამავლობის ფილტრი
MPU-6050- ს აქვს შიდა ინტეგრირებული ციფრული დაბალი გამავლობის ფილტრი, რომლის გამოყენება შესაძლებელია მაღალი სიხშირის ხმაურის შესამცირებლად, მისი შემცირების სიხშირით.კერძოდ, ჩვენ შეგვიძლია დააყენოთ ციფრული ფილტრის შეწყვეტის სიხშირე MPU-6050- ის კონფიგურაციის რეესტრის შეცვლით, A/D შერჩევით გამოწვეული მაღალი სიხშირის ხმაურის აღმოსაფხვრელად.
MPU-6050 დაფუძნებული მოძრაობის ტრაექტორიის გაანგარიშება
MPU-6050 არის ექვსი ღერძიანი ამაჩქარებელი და გიროსკოპის სენსორი, რომელიც შეიძლება გამოყენებულ იქნას ობიექტების მოძრაობისა და დამოკიდებულების გასაზომად.MPU-6050- ზე დაფუძნებული მოძრაობის ტრაექტორიის გაანგარიშება შეიძლება განხორციელდეს შემდეგი ნაბიჯებით:
პირველი ნაბიჯი არის სენსორის მონაცემების წაკითხვა.ჩვენ უნდა წავიკითხოთ აქსელერომეტრის და გიროსკოპის მონაცემები MPU-6050 სენსორებისგან, შესაბამისი დრაივერების და ბიბლიოთეკის ფუნქციების გამოყენებით.ეს მონაცემები, როგორც წესი, გამომავალია ციფრული ფორმატით, ამიტომ საჭიროა კონვერტაციის და კალიბრაციის გარკვეული სამუშაოები ფიზიკურ ერთეულებში რეალურ გაზომვებად.
მეორე ნაბიჯი არის აჩქარების გამოთვლა.პირველ რიგში, ჩვენ უნდა დავამუშავოთ მონაცემები ამაჩქარებელიდან, რომ გამოვიტანოთ ობიექტის დაჩქარება თითოეულ ღერძში.შემდგომში, თითოეულ ღერძში ობიექტის სიჩქარე და გადაადგილება, ჩვენ უნდა გავააქტიუროთ აჩქარების მონაცემები.რიცხვითი ინტეგრაციის ტექნიკა, როგორიცაა Euler- ის მეთოდი ან Lunger-Kutta მეთოდი, ხშირად გამოიყენება ამ პროცესში, გადაადგილების გამოთვლების სიზუსტის უზრუნველსაყოფად.
მესამე ნაბიჯი არის კუთხის სიჩქარის გამოთვლა.გიროსკოპის მონაცემების გამოყენებით, თითოეულ ღერძში ობიექტის კუთხის სიჩქარე შეიძლება გამოითვალოს.კიდევ ერთხელ, ამ მონაცემების დაკალიბრება და გადაკეთებაა საჭირო, რომ მიიღონ კუთხის სიჩქარე ფაქტობრივ ფიზიკურ ერთეულებში.
მეოთხე ნაბიჯი არის როტაციის გამოთვლა.კუთხის სიჩქარის მონაცემების ინტეგრირებით, თითოეულ ღერძში ობიექტის ბრუნვის კუთხე შეიძლება გამოითვალოს.ეს შეიძლება გაკეთდეს რიცხვითი ინტეგრაციის ტექნიკის გამოყენებით, როგორიცაა Euler- ის მეთოდი ან Longe-Kutta მეთოდი კუთხის გამოსათვლელად.
მეხუთე ნაბიჯი არის მონაცემების შერწყმა.ჩვენ ვაერთიანებთ მონაცემებს ამაჩქარომეტებისა და გიროსკოპებისგან, რომ მივიღოთ ობიექტის სრული დამოკიდებულება და პოზიციონირება.ეს შეიძლება გაკეთდეს ალგორითმების გამოყენებით, როგორიცაა მეოთხედი დაფუძნებული დამოკიდებულების გამხსნელი ან ეულერის კუთხის გამხსნელი.
მეექვსე ნაბიჯი არის შედეგების ვიზუალიზაცია.ჩვენ გამოთვლილ ობიექტის მოძრაობის ტრაექტორიას ვაქცევთ 3D კოორდინატულ სისტემაში წერტილების ერთობლიობას და ვაჩვენებთ მას შესაბამისი ვიზუალიზაციის საშუალებების გამოყენებით ობიექტის მოძრაობის ტრაექტორიისა და დამოკიდებულების ცვლილებების უფრო ინტუიციური გაგებისთვის.
ხშირად დასმული კითხვები [ხშირად დასმული კითხვები]
1. რამდენად ზუსტია MPU6050?
შეძენილმა შედეგებმა აჩვენა საკმარისი სიზუსტე 1 % -ზე ნაკლები და საიმედოობა, რაც უზრუნველყოფს ლიფტის ლილვის სათანადო განზომილებას და ლიფტის ინდუსტრიის მაღალ სტანდარტებს.
2. როგორ წავიკითხოთ მონაცემები MPU6050– დან?
შიდა MPU6050 რეესტრების წასაკითხად, ოსტატი აგზავნის საწყის პირობას, რასაც მოჰყვება I2C მონების მისამართი და ჩაწერა ცოტა, შემდეგ კი რეგისტრაციის მისამართი, რომელიც წაიკითხავს.
3. სად გამოიყენება MPU6050?
ჯანმრთელობის თვალყურის დევნის, ფიტნეს თვალყურის დევნის მოწყობილობებში.თვითმფრინავებსა და quadcopters- ში, MPU6050 გამოიყენება პოზიციის კონტროლისთვის.გამოიყენება რობოტული მკლავის კონტროლში.ხელის ჟესტების კონტროლის მოწყობილობები.
4. არის MPU6050 IMU?
MPU6050 IMU სენსორის ბლოკი კითხულობს მონაცემებს MPU-6050 სენსორისგან, რომელიც უკავშირდება აპარატურას.ბლოკის გამოსავალი აჩქარება, კუთხის სიჩქარე და ტემპერატურა სენსორის ღერძების გასწვრივ.
5. რა არის MPU6050– ის დამუშავება?
ეს არის MPU6050- ის საბორტო პროცესორი, რომელიც აერთიანებს ამაჩქარებლისა და გიროსკოპის მონაცემებს.DMP არის MPU6050- ის გამოყენების გასაღები და მოგვიანებით დეტალურად არის განმარტებული.როგორც ყველა მიკროპროცესორთან, DMP- ს სჭირდება firmware, რათა გაუშვათ.
ფუნქციის ტესტი.უმაღლესი ხარჯების ეფექტური პროდუქტები და საუკეთესო მომსახურება არის ჩვენი მარადიული ვალდებულება.
ცხელი სტატია
- CR2032 და CR2016 ურთიერთშემცვლელია
- MOSFET: განმარტება, სამუშაო პრინციპი და შერჩევა
- სარელეო ინსტალაცია და ტესტირება, სარელეო გაყვანილობის დიაგრამების ინტერპრეტაცია
- CR2016 წინააღმდეგ CR2032 რა განსხვავებაა
- NPN წინააღმდეგ PNP: რა განსხვავებაა?
- ESP32 vs STM32: რომელი მიკროკონტროლერი უკეთესია თქვენთვის?
- LM358 ორმაგი საოპერაციო გამაძლიერებლის ყოვლისმომცველი სახელმძღვანელო: pinouts, მიკროსქემის დიაგრამები, ეკვივალენტები, სასარგებლო მაგალითები
- CR2032 vs DL2032 vs CR2025 შედარების სახელმძღვანელო
- განსხვავებების გაგება ESP32 და ESP32-S3 ტექნიკური და შესრულების ანალიზით
- RC სერიის წრის დეტალური ანალიზი
 NRF24L01 საკომუნიკაციო ჩიპის შესაძლებლობებისა და პროგრამების შესწავლა
NRF24L01 საკომუნიკაციო ჩიპის შესაძლებლობებისა და პროგრამების შესწავლა
2024-04-25
 MMBT3904 NPN ტრანზისტორი: მისი სპეციფიკაციები, ყოვლისმომცველი განაცხადის სახელმძღვანელო და MMBT3904 წინააღმდეგ MMBT5551
MMBT3904 NPN ტრანზისტორი: მისი სპეციფიკაციები, ყოვლისმომცველი განაცხადის სახელმძღვანელო და MMBT3904 წინააღმდეგ MMBT5551
2024-04-25
ცხელი ნაწილის ნომერი
 GRM0335C1H120JA01D
GRM0335C1H120JA01D CGJ3E2C0G2A561J080AA
CGJ3E2C0G2A561J080AA JMK316BJ226MD-T
JMK316BJ226MD-T UMK325LD105MN-T
UMK325LD105MN-T- GRM0337U1H6R2CD01D
 GRM1887U2A3R9CZ01D
GRM1887U2A3R9CZ01D C0402JB0J472M020BC
C0402JB0J472M020BC T356B475K016AT
T356B475K016AT- GRM0336R1E2R8CD01D
 SI3019-F-FSR
SI3019-F-FSR
- PD69108ILQ-TR
- VE-J72-EY
- RT0402BRE0711RL
- LC4256V-75TN100I
- XPC8260CZUIHBC
- ADP2387ACPZN-R7
- T495D685M035ZTE300
- ADS7843IDBQRQ1
- PCM1753TDBQRQ1
- TL074ACDRG4
- LM98722CCMTX/NOPB
- ADG333ABRSZ
- ADP1611ARMZ-R7
- T491A154K050AT
- SPC5668GAVMG
- ZSC31010CEG1-R
- OP777ARMZ-REEL
- BCP56
- ADP3180J
- ADS5500IPAPRG4
- BAR64-05WH6327
- CLCE4150S4
- D2816CP
- HA13736FEB-EZZ05
- IKW50N65H5
- LTC4240IGN
- P87C51RA2FA
- UPD703102AGJ-33-W24-UEN
- CT88611P
- M66446FP
- RTM880T-794-VB-GRT
- TEA6851AHN/V205
- HD64F2239FA16
- ADP50290006CBZR
- KL9H016011CFP
- KZ4E063711CFP
- STM32L152RET6TR
- FP6121-KS6PTR
- ESP32-C3-WROOM-02U